Selected academic Projects
Trains LVSM in a VAE latent space to reduce inference cost while retaining novel-view quality and enabling longer context sequences under fixed compute budgets.
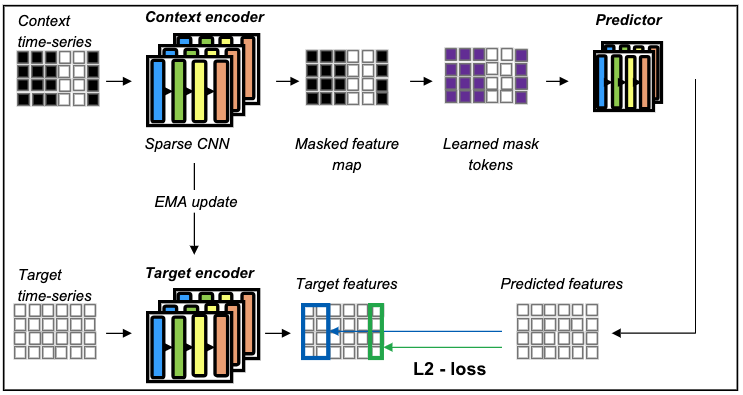
Explores self-supervised learning for tactile sensing with a shared TacNet-II encoder and time-based masking, improving accuracy for material classification.
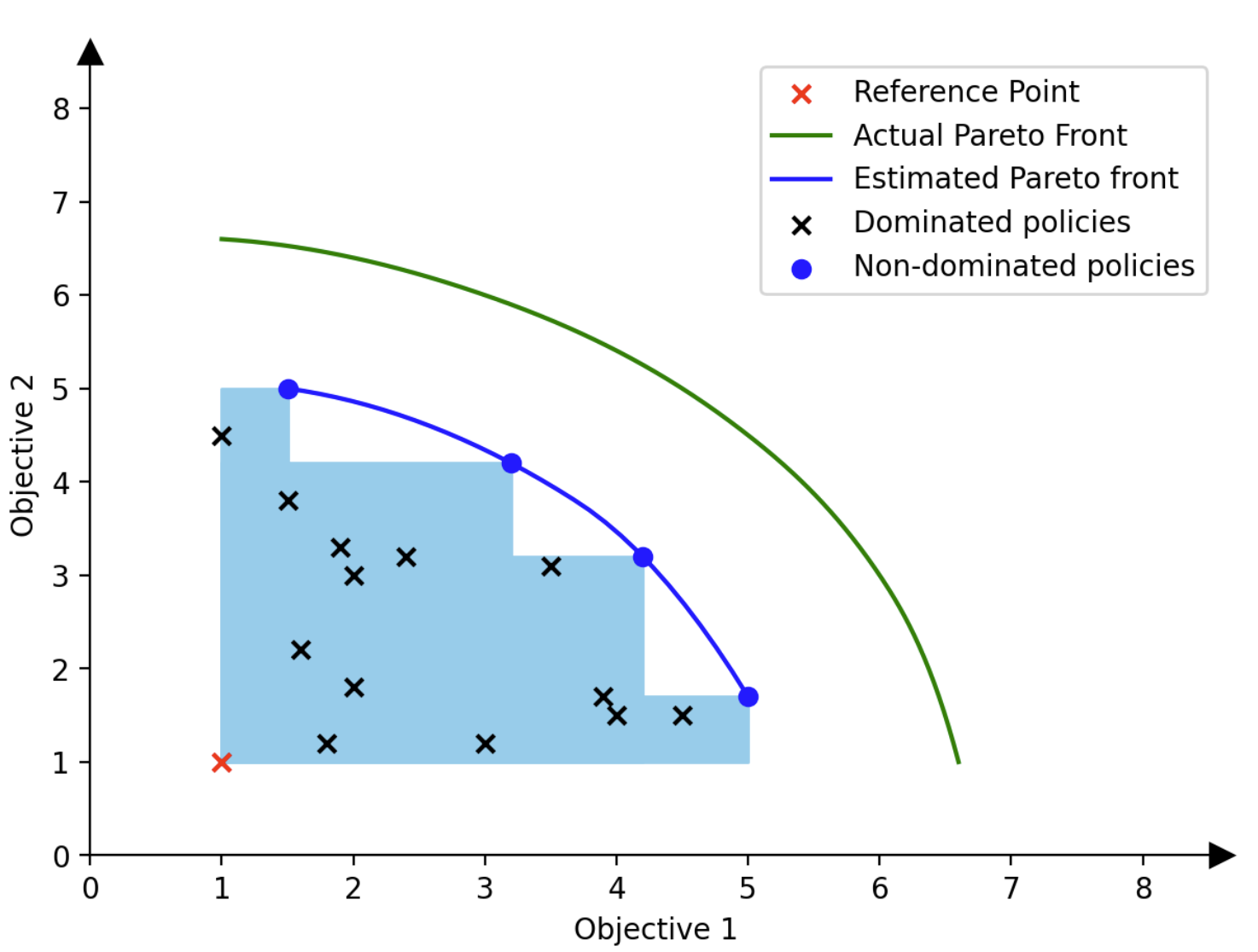
Frames smart grid control as multi-objective RL with separate cost and safety objectives, learning Pareto-optimal trade-offs.
Compares task-parameterized GMMs and elastic dynamical systems for adapting robot motions from demonstrations to new task parameters.

.png)